
[ez-toc]
When implemented correctly, robots can improve the accuracy, efficiency, and repeatability of manufacturing processes. Despite the known benefits of using robots, some manufacturers are still hesitant to implement them, and that’s partially because of two factors: 1) not knowing which types of robots to implement, and 2) uncertainties with the implementation process itself.
There are two major types of robots: collaborative robots and non-collaborative/industrial robots. In this article, we’ll discuss the main differences between these two, their advantages and disadvantages, and what to consider before implementing either robot type.
What Are Collaborative Robots?
Collaborative robots, or cobots, are five-, six-, or seven-axis articulating robotic arms that are outfitted with highly sophisticated sensor technology. This technology allows them to recognize and react quickly to certain events, like the robot hitting an obstacle. These types of robots were specifically built to work safely alongside human workers; cobots may be assigned repetitive tasks, while a human worker completes the more decision-intensive or complex tasks.
Advantages & Disadvantages
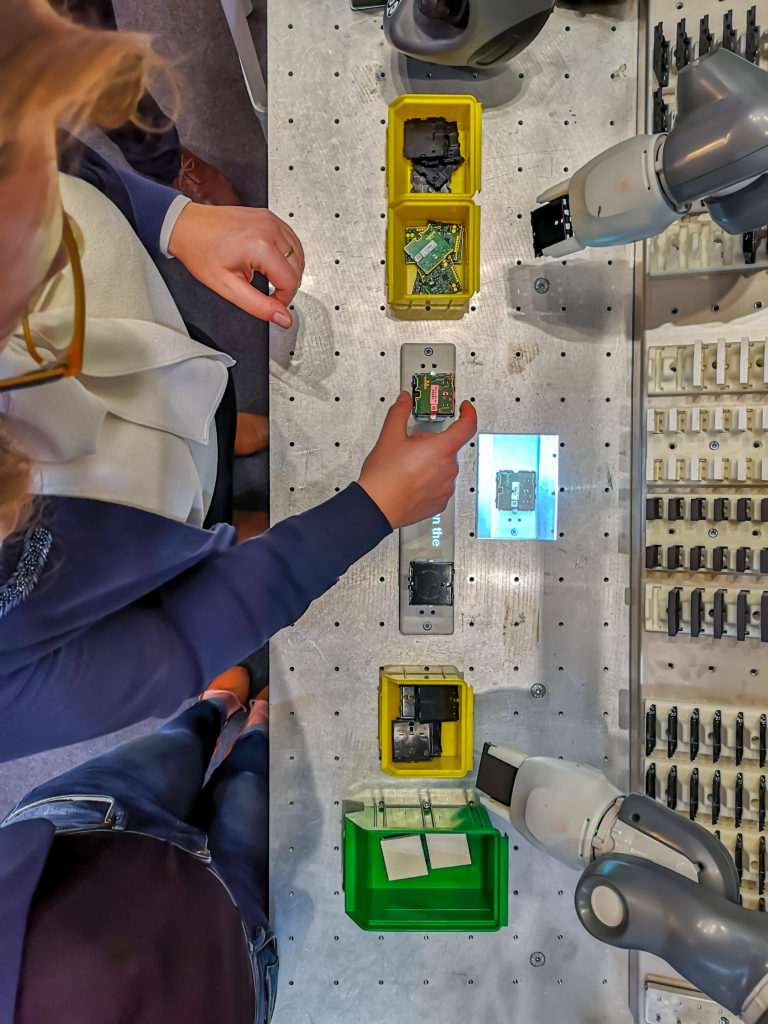
The primary benefit of cobots is that they can be used in the presence of people. This makes them ideal for applications when humans are required to interact directly with the robot. For example, if a technician is welding a component that is held in a fixture, a collaborative robot could move the fixture around as the technician welds the component, preventing the need for the technician to move around to weld different areas of the component. With a collaborative robot, this process becomes much easier.
Cobots are also designed with safety features such as rounded edges, a reduced speed, and limits to how much force they can apply. However, it’s important to note that although cobots are safe, if they are handling hazardous objects, there is still an injury risk for human workers.
The main disadvantages of using collaborative robots in manufacturing processes is that they are fairly expensive to purchase. And, when compared to traditional industrial robots, they are also slower by design and less accurate.
What Are Industrial Robots?
A non-collaborative/industrial robot is a servo motor-based system that is designed to be fast and accurate with movement on three or more axes. Industrial robots can also be split into six categories: Cartesian, SCARA, cylindrical, delta, polar, and vertically articulated.
The primary purpose of an industrial robot is to automate certain manufacturing processes, including pick-and-place, painting, assembly, and welding. These automated robots don’t require much human oversight or interaction, and they are designed with various levels of precision, capacity, speed, rotational, axial, and lateral movements.
Advantages & Disadvantages
Industrial robots have the benefit of being faster and more accurate when compared to collaborative robots. They are built to exceed the ability of an operator in terms of speed and accuracy which is where they derived their ROI. They are also more cost-effective, even when purchasing a safety system to go along with the robot.
The downside of industrial robots is that, because of their speed, they are not safe for humans, within their reach, without the use of additional safety systems. The good news is that in recent years, there have been many industrial robot safety products developed which are easy to use, cost-effective, and make industrial robots safe.
Adding Safety Systems to Industrial Robots
As previously mentioned, industrial robots were primarily designed for speed and precision, not safety. To prevent risk of injury to humans around them, using safety systems like structural guarding, light curtains, scanners, and pressure-sensitive “skins” with non-collaborative robots is recommended.
Safety scanners have become very popular, they work similar to the auto doors at the grocery store by sensing a human approaching. Robot safety scanners will sense the entire area around the robot. This effectively creates a safe work zone around the robotics system. When a human worker enters the zone, the robot will start to move slower, and when that same worker reaches a certain proximity, the robot will stop working altogether. Once the worker leaves the space, the robot will begin working again at its normal (fast) speed. This is a very effective solution to robot safety when occasional human access in the robot zone is needed.
Pressure-sensitive “skin” is another robot safety strategy. The “skin” is applied directly to the robot arm, and when activated in a “collaborative mode,” the robot speed will maintain a low speed state, the robot also has the ability to leave the collaborative state and function at full speed when needed. This safety strategy applied to a non-collaborative robot most closely resembles a true collaborative robot. When you touch the “skin,” the robot will stop entirely. With skins, the robot will not know if someone is approaching its zone, but scanners can also be used if it’s desirable to run the robot in both high speed mode with limited access and collaborative mode.
Should You Implement a Collaborative Robot or an Industrial Robot?
Knowing what type of robot (industrial or collaborative) you need is a question of application. What type of work is being done in your facility and how often does that work require direct interaction with a robot?
Industrial robots can entirely automate a process without human interaction, and they can do so with high precision and efficiency. Collaborative robots are only needed when humans are expected to directly interact with the robot or work in the robot zone a significant percentage of the time.
If safety is a concern, both industrial robots (with added safety systems) and collaborative robots are great options. If your application doesn’t require your employees to interact closely with a robot, a standard, industrial robot would be the most valuable option. On the other hand, if close collaboration is necessary, then a collaborative robot is most likely going to be the better investment for you.
Common Implementation Mistakes
A common mistake some manufacturers make is implementing collaborative robots when it’s not actually necessary for their application. This is not only a more expensive option, but can also result in the manufacturer not getting the most value from their money as an industrial robot operates much faster and with more precision when compared to a collaborative robot.
Another mistake manufacturers make is assuming that adding safety systems will be a lengthy and complicated process. While installing safety guarding around a robot can be a time-consuming process, it’s no longer necessary as sensing technology has become more advanced. Newer safety systems are not difficult to install, and again, an industrial robot with a safety system is still going to be less expensive and more efficient than a collaborative robot.
The final mistake manufacturers make is not performing a thorough application evaluation or risk assessment before implementation. As previously mentioned, collaborative robots are designed with human safety in mind, but there can still be some risk if the robot is handling unsafe materials. Be sure you evaluate your existing environment, the end-of-arm tooling your robot is using, and the types of materials your robot is interacting with.
Find Your Solution With Help From Schneider & Company
Do you still have questions about collaborative versus non-collaborative robots? Reach out to Schneider & Company. We’re an authorized EPSON distributor and representative to manufacturers across North America. No matter your industry or application, we’re here to help you find the most valuable solution.
Visit our website to learn more about our robotic and automation products and solutions or fill out our online form today to schedule a consultation with one of our experts.